
国内学会:SI2023にて,優秀講演賞 2件を受賞
現在M1の加藤くんが取り組んでいる,大規模言語モデルを活用した想定外対応可能な建機群システムの研究が第24回計測自動制御学会システムインテグレーション部門講演会(SI2023)において発表した研究が優秀講演賞を受賞しました. また,共同研究先の成蹊大学の稲川さんが実施している建機群システムの実世界応用研究も優秀講演賞を受賞しました.
現在M1の加藤くんが取り組んでいる,大規模言語モデルを活用した想定外対応可能な建機群システムの研究が第24回計測自動制御学会システムインテグレーション部門講演会(SI2023)において発表した研究が優秀講演賞を受賞しました. また,共同研究先の成蹊大学の稲川さんが実施している建機群システムの実世界応用研究も優秀講演賞を受賞しました.

想定外への対応もできる建機群協働システム 鍵:必要な性能を持ったチームを自己組織する 国立研究開発法人 土木研究所で開催されましたWSに参加し,「バックホウとダンプトラックによるインフラ作業の実現:トラブル対応可能なアルゴリズム」を紹介しました. オペレータと自律建機(バックホウやダンプトラック)群が協働して,溝にハマったり,燃料がなくなったりするトラブルが作業中に発生しても,各チームが自律分散的 […]

第41回 ロボット学会学術講演会 指導学生 M1 吉田(尚)くんによる「大規模言語モデルを活用した群ロボットの意思決定」の発表がありました. また,学びとしてもとても有意義な学会でした. なぜなら,今回は,大規模言語モデルと基盤モデルに関する講演が急に多くなり,これまでできなかったことができるようになる,そのHow toもたくさん聞けて,とても満足です. 日本のロボットの分野の方も大規模言語モデル […]
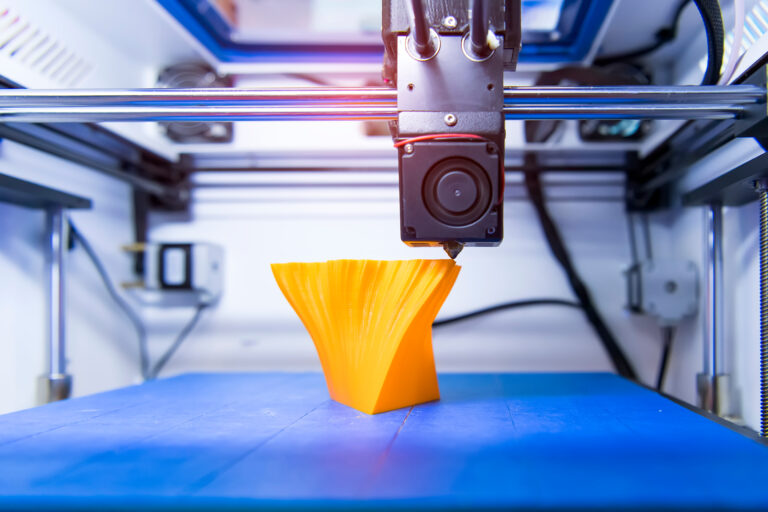
今日は、3Dプリンタ「Adventure 3」を安定して使い続ける方法を5つ選んで紹介します。 3Dプリンタはノウハウが大事ですので、ぜひ参考にしてください。 ポイント1:フィラメントは「Modera PLA Base White」を選ぶ! 3Dプリンタは印刷の失敗がないことが一番大事です。 Adventure 3では、印刷が安定していますが、失敗するケースでは、印刷面から剥がれない、フィラメント […]
これから、科研費 学術変革などの大型プロジェクトに出そうと考えている方、必見です。 今回は、学術変革Bの計画研究に一発採択された私の経験(強運を持った人)から「こんなところを意識すると良いでしょう!」の攻略法を紹介していきます。 ※ もちろん、全ての分野の申請書に当てはまるわけではないので、その点はご注意ください! 若い時に、大きな予算がつくプロジェクトはメンタルが安定となります。 ヘテロ群知能 […]
卒論、修論の研究テーマをどのように決めるべきなのか、主体的に研究を進めるためにはどのようにしたら良いのか、noteにて「卒論・修論の研究テーマ決め:受け身で決めない思考が重要」として書きました。 最後の学びの場である研究室で、主体的に研究を進め、有意義な研究室ライフを送るために、ぜひ一度お読みください。

2月に入り、卒論や修論のプレゼンを間近に控えてきた人も多いのではないでしょうか。卒論、修論の執筆は目が回るほど大変です。 色々なアドバイスを教授や先輩から受けて、頭がパニックな人も多いことでしょう。 そこで、今回は「卒論・修論プレゼンでここは抑えろ!」というポイント、「スライド発表に絶対に入れるべき話は何?」を3分で確認できるチェックシートを作りました。 ただし、もう文章なんか読んでる余裕あるか! […]
先日SI2021の学会(計測自動制御学会 SI部門)にて,末岡が指導する学生2名が優秀発表賞を受賞しました. 「沖本将崇,末岡裕一郎,杉本靖博,大須賀公一:Attention-based Neural Networkを用いたスケーラブルな協調行動の学習」 「武部直人,末岡裕一郎,杉本靖博,大須賀公一:柔軟な全方向移動車両の構造と自由度を活かした多様な運動の実現」 それぞれの研究について簡潔に紹介し […]
末岡 裕一郎が計画研究で参画している学術変革Bのプロジェクトのホームページが公開されました. (https://heteroswarm.org/) 12月20日のキックオフミーティング(非公開)にて「群知能とはどんなもの?」というタイトルで講演させていただきます. 講演時間は35分程度を予定しております. キックオフミーティングはclosedで開催されますので,興味を持たれた方,群ロボットや群れ, […]
ブログもずいぶんご無沙汰になってしまいました,末岡です. この度,私が研究指導しておりますM2の学生3名(沖本くん,武部くん,原田くん)がSI2021(https://sice-si.org/conf/si2021/)で研究発表しましたので報告いたします. SI2021での発表題目 柔軟な全方向移動車両の構造と自由度を活かした多様な運動の実現 大阪大学 武部 直人、末岡 裕一郎、杉本 靖博、大須賀 […]