末岡裕一郎の紹介

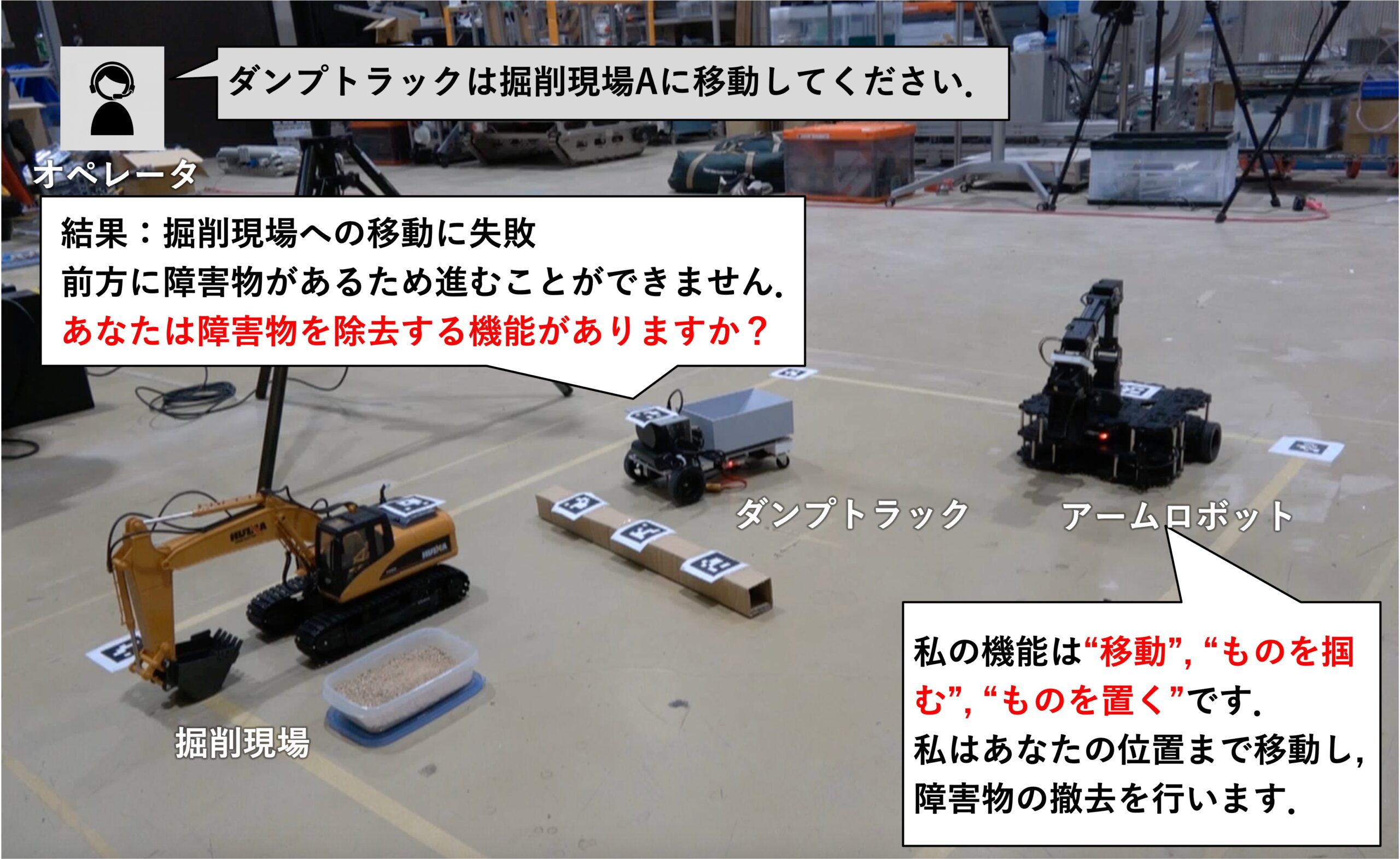
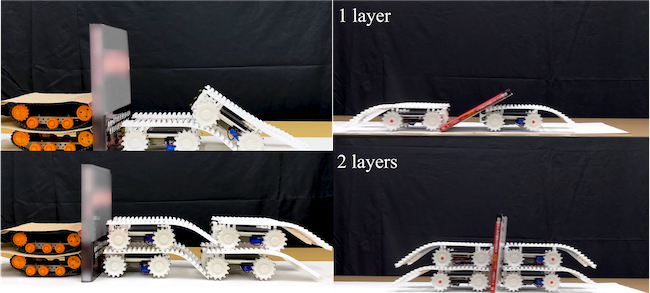
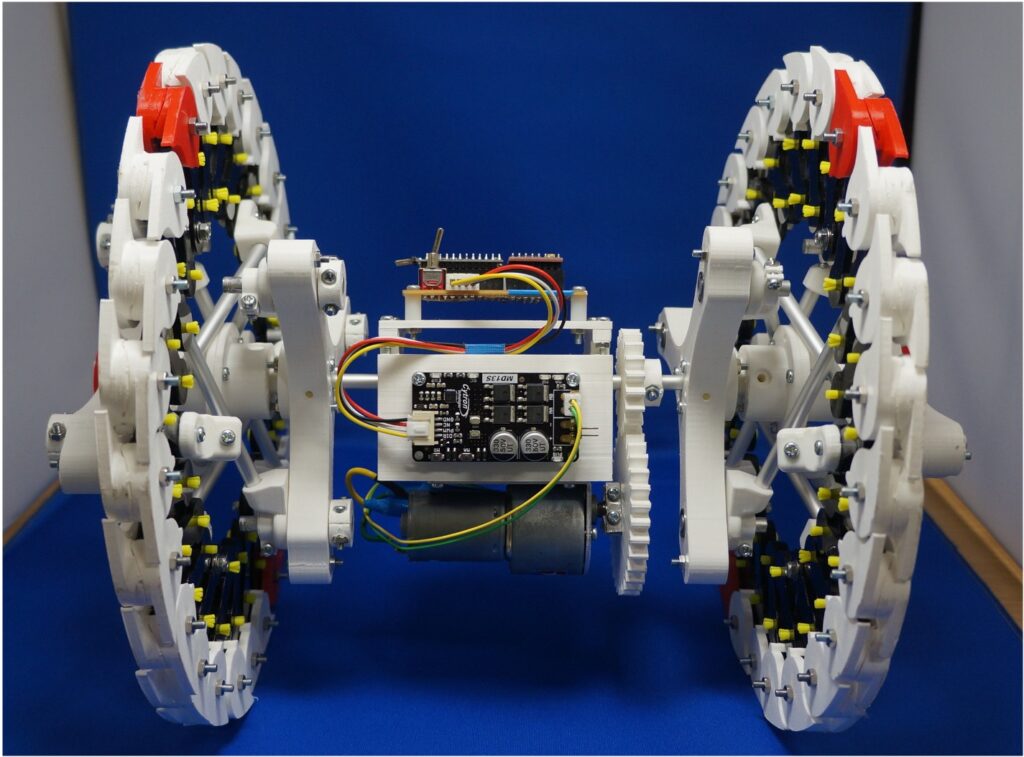
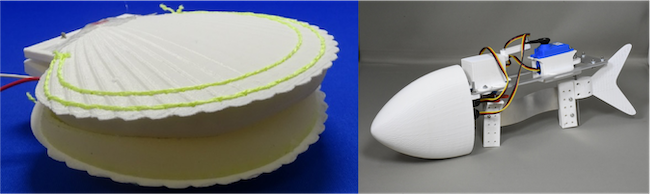
研究開発したシステムの紹介
動画はこちら(←YouTube)

連絡先
- sueokaあっとmech.eng.osaka-u.ac.jp(あっとを@に変えてください)
実施プロジェクト
- JST K program 「協調・デジタルツイン技術の革新による小型無人機群システムの構築」(代表)
- JSPS 若手研究(代表)
- 積水化学 自然に学ぶものづくりプロジェクト(代表)
- JST ムーンショット目標3「多様な環境に適応しインフラ構築を革新する協働AIロボット」 (sub-PI)
- 学術変革 B「ヘテロ群知能」領域A01 分担 (発足メンバー)
- 科研費 基盤 B(分担)
- Robo Cafe(HPはこちら,クラウドファンディングページはこちら)
- みんなの制御塾(理事)
論文(数が多いので興味ある方は下をクリックしてください)
受賞
- 2025年2月:第25回計測自動制御学会 SI部門講演会 優秀講演賞 2件
- 2024年1月:第24回計測自動制御学会 SI部門講演会 優秀講演賞 2件
- 2022年5月:ICRA2022 Workshop Future Robotics Vision Contest Winner (2nd place)
- 2022年5月:システム制御情報学会論文賞
- 2022年1月:第22回計測自動制御学会 SI部門講演会 優秀講演賞 2件
- 2022年1月:第21回計測自動制御学会 SI部門講演会 優秀講演賞 2件
- 2017年12月:第18回計測自動制御学会 SI部門講演会 優秀講演賞
- 2017年6月:油空圧機器技術振興財団 論文顕彰
- 2017年3月:大阪大学工学研究科長表彰 受賞
- 2016年12月:第17回計測自動制御学会 SI部門講演会 優秀講演賞
- 2015年3月:自動車技術会大学院研究奨励賞
- 2013年12月:第14回計測自動制御学会 SI部門講演会 優秀講演賞
- 2013年10月:NOLTA Student Paper Award
- 2013年9月:創発システムシンポジウム 準ポスター賞
- 2013年2月:計測自動制御学会 学術奨励賞 研究奨励賞
- 2012年10月:生産技術振興協会 海外論文発表奨励賞
- 2012年3月:日本設計工学会 武藤栄次賞 優秀学生賞
- 2011年12月:第12回計測自動制御学会 SI部門講演会 優秀講演賞
獲得資金
- 【代表】JST K program,協調・デジタルツイン技術の革新による小型無人機群システムの構築,研究費:11億2,380万,研究期間:2024年4月〜2029年3月.
- 【代表】JST ACT-X,Self-Attention Neural Networkで切り拓く革新的な群ロボットシステム学,研究費:1,365万円,研究期間:2022年10月〜2026年3月(加速フェーズ含む).
- 【分担】科研費 学術変革領域研究(B)計画研究,ヘテロ群知能の構成論的アプローチから切り拓くハイアベレージなシステムの設計論,研究費:1,610万円,2021年10月〜2024年3月.
- 【代表】科研費 若手研究,シープドッグに学ぶ群ロボットのクラスタリング,研究費:455万円,2021年度〜2023年度.
- 【代表】奨学寄附金 積水化学 自然に学ぶものづくり研究助成,1000台のロボット制御システム設計,研究費:250万円,2020年10月〜2021年9月.
- 【分担】科研費 基盤B,総額:180万円,2020年4月〜2023年3月.
- 【代表】科研費 若手研究,蟻の群行動に学ぶロボットナビゲーション,研究費:410万円,2018年4月〜2021年3月.
- 【代表】奨学寄附金 立石科学技術振興財団研究助成A,人の操作を考慮した階層性群ロボットシステム設計,研究費:250万円,2019年6月〜2020年6月.
- 【代表】奨学寄附金 カワイサウンド技術・音楽振興財団 研究助成,ロボットが奏でるマーチングバンド研究,研究費:50万円,2017年10月〜2018年9月.
- 【代表】クラウドファンディング 「Robo Café 」,資金調達:80万円,2019年7月.
- 【代表】科研費 研究活動スタート支援,環境を操作し,群ロボットを制御する研究,研究費:250万円,2015年9月〜2017年3月.