大阪大学大学院工学研究科 機械工学専攻 末岡研究室 のHPです。

研究室の理念
末岡研究室では、「AIの力」×「機の力」×「アイデアの力」で、人とロボットが共に過ごす未来社会にイノベーションを創出します。計測、制御、AI、デジタルツインなどの最先端の情報技術と、ダイナミクス、システムを扱う機械工学を共創させることで、実世界での革新的な知能システムの創成を目指します。
これまで、内閣府ムーンショットプロジェクトにて、月面における協調作業や災害時の対応を可能とする適応的な小型ロボット群システム開発に従事してきました。また、現在はJST 経済安全保障重要技術育成プログラムにて、人とドローン群の連携した最先端の群協調システムの開発を進めています。
2019年にはクラウドファンディングプロジェクト Robo Cafeを立ち上げ、2021年10月みんなの制御塾を共同設立し、小中高生向けのプログラミング教室も毎年、開催しています。
NEW!新4回生向け研究室公開(2026年4月1日,2日)について
(更新中!)
研究紹介
末岡研究室では、実世界での人とロボット群の協働・協調システム、ロボット群の協調システムを研究しています。現在、建機などの地上ロボット、ドローンなどの空中システムなどを研究対象にしています。
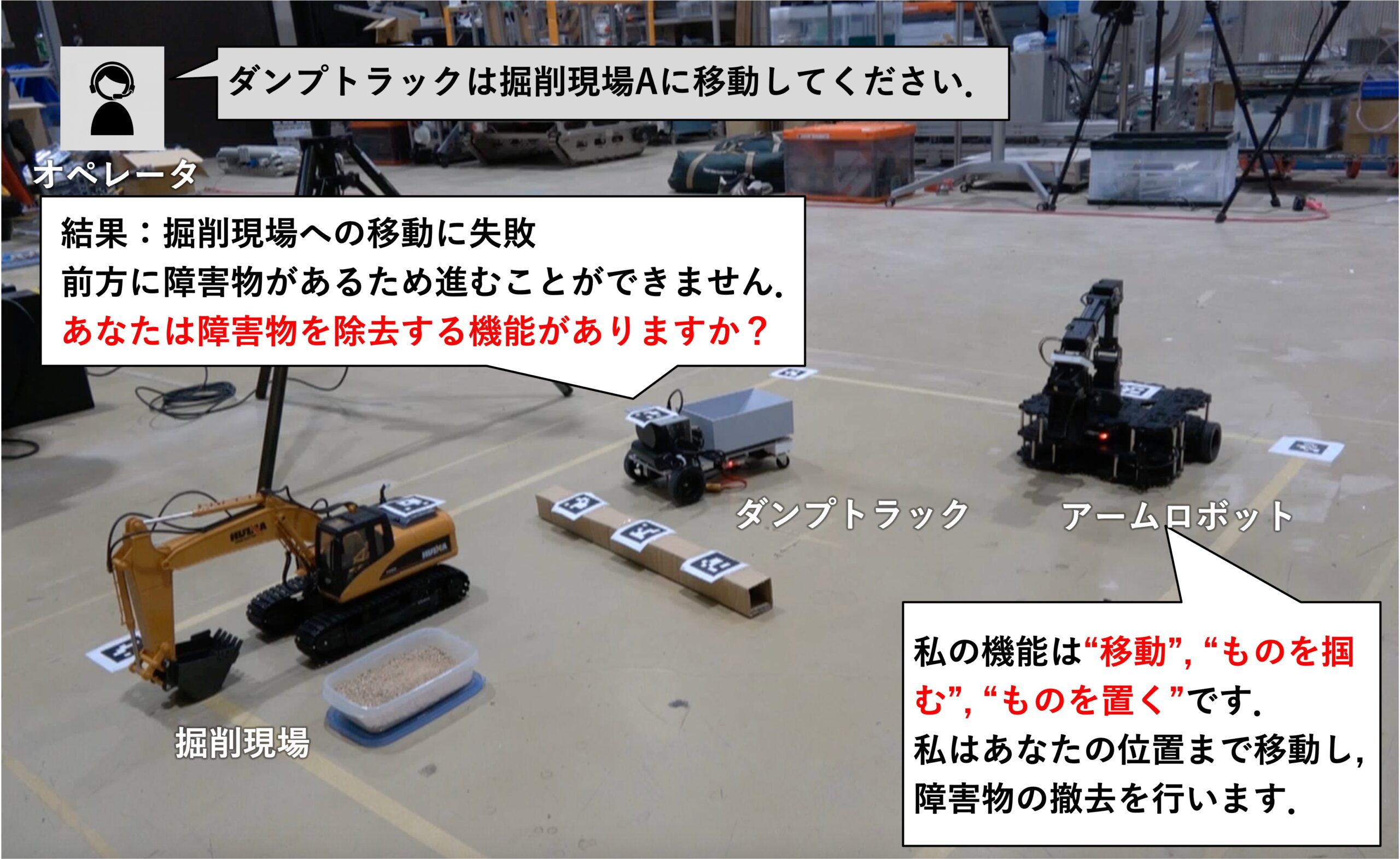
AI-pioneered Construction Machinery System
大規模言語モデルを活用した,ヘテロなロボットの機能表現に基づく臨機応変な協調システム(動画はこちらで紹介されています)
必見:遠心力で大きくなる移動ロボット
その他にも...たくさん
- 群ロボットのナビゲーション研究
- 協力して高い壁を登る群ロボット
- Carrybots:不安定な物体の協調搬送に向けた,相互乗り上げ可能なロボット
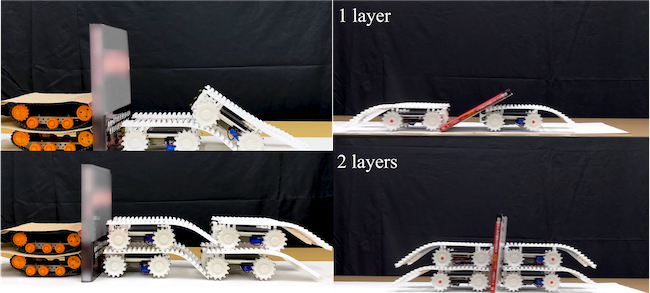
- DUCKS-Children:ダブルクローラ方式による荷物協調積載ロボット

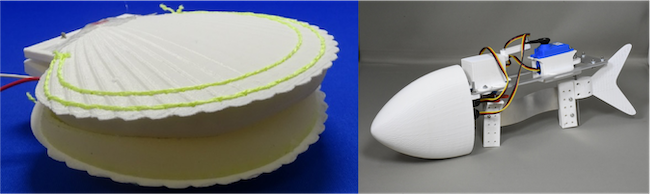
水中ロボットも!
- 魚型ロボットの研究紹介